
Face tracking using Raspberry Pi.
Hey guys, In this blog we will be making a simple face tracking device using Raspberry Pi.

Hey guys, In this blog we will be making a simple face tracking device using Raspberry Pi.
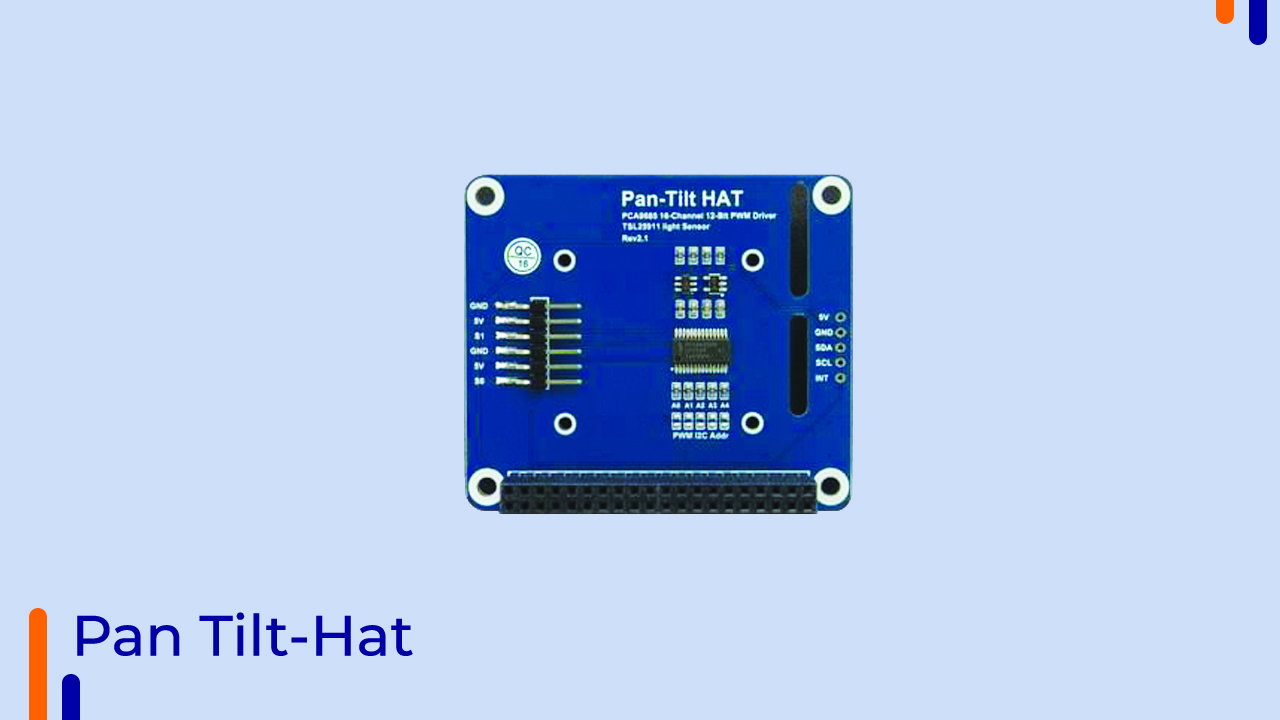
This device will help track your face i.e:- it will move wherever your face moves. Whenever you are designing a mechatronic system. The fundamental way to start is the structure. I have used a pan-tilt mechanism. the pan-tilt module by waveshare is amazing for that..you can also 3d print your own structure if you want from robu's website.
Here is the project output for reference. this is how the project looks after it is completed.

Now when we have taken a look at how the project output will look like. let's take a look at the components we need for the project.
- Raspberry pi 4b x 1

1 x Waveshare Pan tilt hat
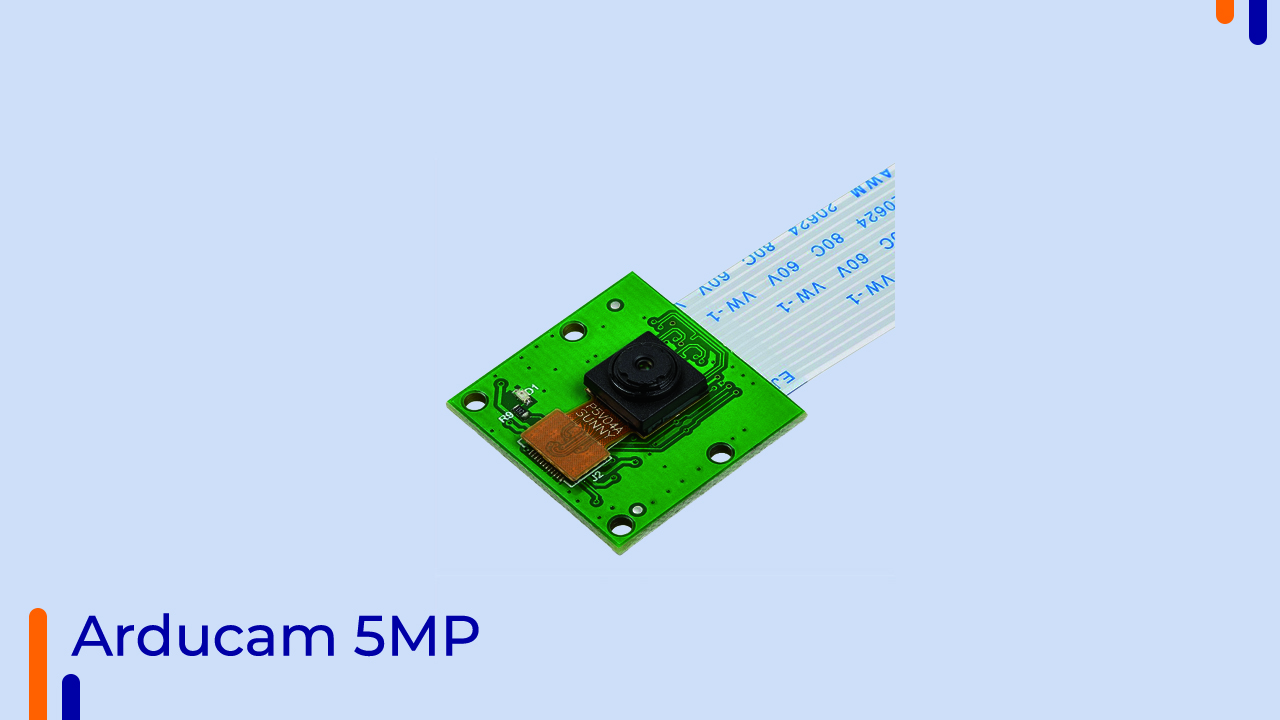
1x Raspberry pi based camera
Code for Face Tracking
import numpy as np
import cv2
import os
import time
import picamera
import RPi.GPIO as GPIO
from PCA9685 import PCA9685
pwm = PCA9685()
pwm.setPWMFreq(50)
faceCascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
cap = cv2.VideoCapture(0)
cap.set(3,640) # set Width
cap.set(4,480) # set Height
current_PAN = 90
current_TILT = 20
pwm.setRotationAngle(1, 180) #PAN
pwm.setRotationAngle(0, current_TILT) #TILT
x=230
y=110
while True:
ret, img = cap.read()
#img = cv2.flip(img, -1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
faces = faceCascade.detectMultiScale(
gray,
scaleFactor=1.2,
minNeighbors=5,
minSize=(20,20)
)
for (x,y,w,h) in faces:
print(x,y,w,h)
cv2.rectangle(img,(x,y),(x+w,y+h),(255,0,0),2)
roi_gray = gray[y:y+h, x:x+w]
roi_color = img[y:y+h, x:x+w]
if x in range(220,240):
time.sleep(0.0001)
elif x> 240:
pwm.setRotationAngle(1, current_PAN) #PAN
current_PAN=current_PAN-2
time.sleep(0.0001)
elif x<220:
pwm.setRotationAngle(1, current_PAN) #PAN
current_PAN=current_PAN+2
time.sleep(0.0001)
if y in range(60,140):
time.sleep(0.0001)
elif y> 140:
pwm.setRotationAngle(0, current_TILT) #PAN
current_TILT=current_TILT+2
time.sleep(0.0001)
elif y<60:
pwm.setRotationAngle(0, current_TILT) #PAN
current_TILT=current_TILT-2
time.sleep(0.01)
cv2.imshow('video',img)
k = cv2.waitKey(30) & 0xff
if k == 27: # press 'ESC' to quit
break
cap.release()
cv2.destroyAllWindows()Stay safe. Stay tuned at robu.in
About Robu
India's biggest robotics E-commerce company. Robu deals with Arduino, Raspberry Pi, Sensors, Drone parts, 3D printer parts, E-bike accessories and Electronics components etc. Click here to explore range of Robotics products available at Robu. Also, do not forget to follow us on Facebook, Instagram and YouTube because we are constantly contributing to the community by creating content around Arduino, Raspberry Pi, Drones, Sensors etc.
Related Posts
IR (Infrared) And PIR Motion Sensor With Arduino And With Raspberry PI
Saturday April 25, 2020 6093 Views
In this blog, we discuss the types of infrared sensors and interfacing of IR sensor with Raspberry Pi 4 and Arduino board. ... Read More

Your tiny Pico is now Wireless | Launching all new Raspberry Pi Pico
Wednesday June 29, 2022 1323 Views
You old pal raspberry pi pico is now wireless. After increasing demand for a wireless embedded pico, raspberry pi has now brought the pico w model just for you. ... Read More

EASY DIY Gaming - CodeDino Chronicles
Wednesday January 24, 2024 717 Views
Today we’re going to build an Handheld Dino Game based using Raspberry Pi Pico. Also we’ll be using a 20X4 LCD Display so that we have plenty of screen space. Along with... Read More
Raspberry Pi Zero 2W : How to log data to an external data service easily like MongoDB
Monday June 17, 2024 667 Views
In this example we’ll learn how to set things up so that we can send data to external service and save it there reliably for long tern storage solution, rather... Read More